
Um robô, que tem um ímã em sua base, se desloca sobre a superfície externa de um cubo metálico, ao longo de segmentos de reta cujas extremidades são pontos médios de arestas e centros de faces. Ele inicia seu deslocamento no ponto P, centro da face superior do cubo, segue para o centro da próxima face, converte à esquerda e segue para o centro da face seguinte, converte à direita e continua sua movimentação, sempre alternando entre conversões à esquerda e à direita quando alcança o centro de uma face. O robô só termina sua movimentação quando retorna ao ponto P. A figura apresenta os deslocamentos iniciais desse robô.

A projeção ortogonal do trajeto descrito por esse robô sobre o plano da base, após terminada sua movimentalção, visualizada da posição em que se está enxergando esse cubo, é
A)

B)

C)

D)

E)


Resolução Em Texto
Matérias Necessárias para a Solução da Questão
Geometria Espacial (Vistas Ortogonais e Projeção Ortogonal).
Tema/Objetivo Geral
Visualização Espacial. O objetivo é converter um movimento tridimensional complexo (andar sobre as faces de um cubo) em uma representação bidimensional simples (sombra no chão).
Nível da Questão: Médio
- Exige uma capacidade de abstração espacial apurada. O aluno precisa ignorar a dimensão vertical (“altura”) e focar exclusivamente no deslocamento horizontal (“norte-sul” e “leste-oeste”) para desenhar a trajetória no plano da base.
Gabarito: Alternativa A
- A projeção do trajeto forma um quadrado rotacionado em 45 graus (um losango) inscrito na base, conectando os pontos médios dos lados do quadrado base.
PASSO 1 – O QUE A QUESTÃO QUER? (O MAPA DA MINA)
Decodificação do Objetivo:
A questão pede a “sombra” (projeção ortogonal) do caminho percorrido pelo robô. Você deve ignorar se o robô sobe ou desce; o que importa é apenas para onde ele vai em relação ao chão (para frente, para trás, para a esquerda, para a direita).
Simplificação Radical (A Analogia Central):
Imagine que é meio-dia e o sol está a pino, exatamente em cima do cubo. O robô é uma formiguinha andando pelo cubo. A pergunta é: qual desenho a sombra da formiguinha faz no chão?
Se ela sobe uma parede vertical, a sombra fica parada. Se ela anda de lado na parede, a sombra anda junto.
Nosso Plano de Ataque será o seguinte:
- Rastrear o Caminho: Definir a sequência exata de faces que o robô visita.
- Achatar o Mundo: Para cada movimento 3D, desenhar o correspondente 2D no chão.
- Ligar os Pontos: Conectar as posições projetadas para revelar a figura geométrica final.
PASSO 2 – DESVENDANDO AS FERRAMENTAS (A CAIXA DE FERRAMENTAS)
Para resolver questões de Projeção Ortogonal, usamos a técnica do Mapeamento de Pontos-Chave.
Regra de Ouro da Projeção no Chão:
- Movimento Vertical (Subir/Descer): A projeção é um PONTO (a sombra não sai do lugar).
- Movimento Horizontal (Lado/Frente/Trás): A projeção é uma LINHA (a sombra se desloca).
Uma imagem poderosa pode transformar um conceito abstrato em uma memória inesquecível. A ilustração a seguir foi criada para visualizar a essência da nossa análise, tornando a ideia central clara e impactante:
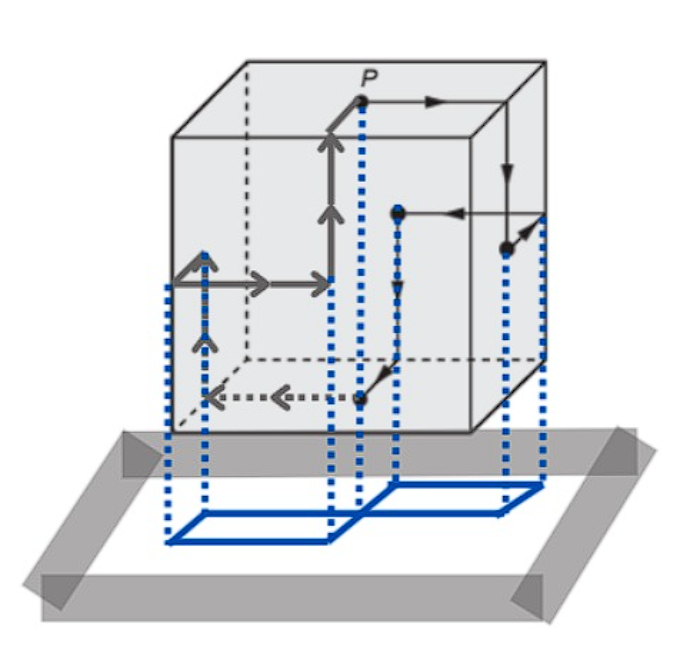
(Trajetória 3D e sua Sombra 2D): Observe na linha azul tracejada (no chão) como o trajeto conecta os pontos médios das arestas da base, formando a figura geométrica desejada.
PASSO 3 – INTERPRETAÇÃO GUIADA (MÃO NA MASSA)
Vamos seguir o robô passo a passo e desenhar a sombra simultaneamente.
Ponto de Partida: O robô está em PP (Centro da Face Superior).
- Sombra: Está exatamente no centro do quadrado da base.
Movimento 1: De PP para o Centro da Face Frontal.
- O robô anda “para frente” até a borda e desce.
- Sombra: Sai do centro e vai até o meio da aresta da frente. (Desenha uma linha do centro até a borda).
Movimento 2: Conversão à Esquerda →→ Vai para a Face Lateral Direita.
- O robô sai do Centro da Face Frontal e vai para o Centro da Face Direita.
- Para fazer isso, ele atravessa a aresta vertical entre as faces.
- Sombra: Ele sai do meio da aresta da frente e vai até o meio da aresta da direita. Isso cria uma linha diagonal cortando o canto.
Movimento 3: Conversão à Direita →→Vai para a Face Traseira.
- (Nota: Se ele está na direita e vira à direita, ele vai para a face de trás).
- Sombra: Sai do meio da aresta da direita e vai até o meio da aresta do fundo. Outra linha diagonal.
Movimento 4: Conversão à Esquerda →→ Vai para a Face Lateral Esquerda.
- Sombra: Sai do meio da aresta do fundo e vai até o meio da aresta da esquerda.
Movimento 5: Retorno ao Topo.
- O ciclo se fecha. Ele sai da esquerda e volta para o topo/centro.
- Sombra: Sai do meio da aresta da esquerda e volta para o centro.
A Figura Final:
Ao ligar esses pontos na sua mente (ou no papel), você verá um quadrado inclinado (como um losango ou pipa), cujos vértices tocam exatamente os pontos médios dos lados do quadrado da base.
🚨 ARMADILHA CLÁSSICA! 🚨
O erro mais comum é tentar visualizar o cubo em 3D e se perder nas subidas e descidas. Esqueça a altura! Imagine apenas o mapa visto de cima (planta baixa). Se você tentar desenhar as paredes laterais na projeção, vai errar. A projeção é apenas o “chão”.
A Bússola (O Perfil do Culpado)
Síntese do raciocínio: O caminho liga os pontos médios das laterais do quadrado.
Expectativa: Devemos buscar uma figura que se pareça com um losango inscrito dentro de um quadrado.
PASSO 4 – ALTERNATIVAS COMENTADAS (A AUTÓPSIA)
(A) Losango (Quadrado rotacionado).
Análise de Correspondência: Esta figura mostra exatamente o trajeto que conecta os pontos médios dos lados do quadrado base. Se você observar a imagem fornecida no Passo 2 (linhas azuis no chão), verá que ela casa perfeitamente com esta opção.
Conclusão: ✔️ Alternativa correta.
(B) Figura Cruzada/Dois Retângulos.
Diagnóstico do Erro: Excesso de Linhas.
Esta opção sugere que o robô cruzou o centro do cubo várias vezes ou andou em linhas retas de um lado ao outro (tipo cruz), o que não aconteceu. Ele andou pelas bordas.
Conclusão: ❌ Alternativa incorreta.
(C) Retângulos Paralelos.
Diagnóstico do Erro: Fuga ao Tema.
Não há conexão diagonal entre as faces nesta figura. Isso implicaria que o robô pulou de uma face para a oposta sem passar pelas adjacentes.
Conclusão: ❌ Alternativa incorreta.
(D) Linha Reta.
Diagnóstico do Erro: Simplificação Excessiva.
Isso seria a projeção se o robô andasse apenas em linha reta de uma face para a oposta e voltasse.
Conclusão: ❌ Alternativa incorreta.
(E) Figura em “Z” ou “S”.
Diagnóstico do Erro: Trajeto Aberto.
Esta figura não fecha o ciclo (não volta ao ponto PP de forma simétrica) ou sugere um caminho irregular que não condiz com a alternância “esquerda-direita” perfeita do enunciado.
Conclusão: ❌ Alternativa incorreta.
PASSO 5 – O GRAND FINALE (APRENDIZAGEM EXPANDIDA)
A resposta é a Alternativa A. O trajeto projetado é o perímetro do polígono formado pelos centros das faces laterais projetados no plano.
Resumo-flash (A Imagem Mental):
“Na projeção ortogonal, subir parede é ficar parado; andar de lado é riscar o chão. O robô desenhou um diamante no piso.”
Para ir Além (A Ponte para o Futuro):
Este princípio é a base da Arquitetura e Engenharia Civil. Quando um arquiteto desenha a “Planta Baixa” de uma casa, ele está fazendo exatamente o que fizemos aqui: uma projeção ortogonal (corte horizontal) de um objeto 3D, ignorando as alturas para mostrar a distribuição dos cômodos no plano.
